Projects
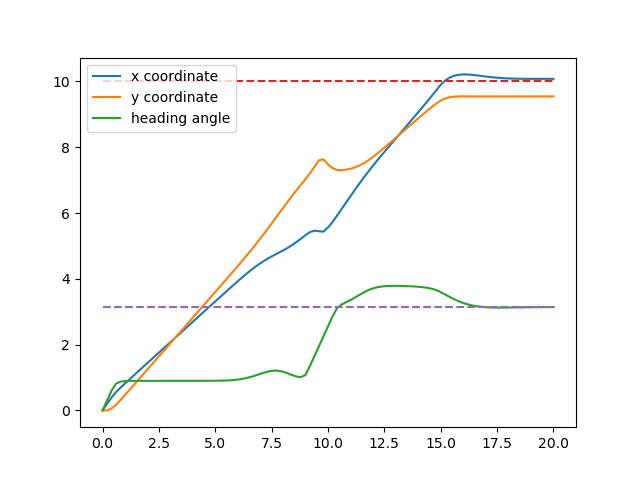
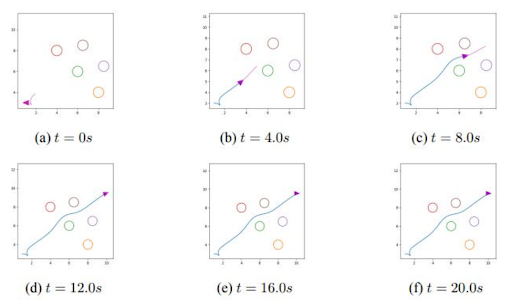
Optimal Trajectory Generation For Autonomous Navigation Of Wheeled Robots
Final year project for the completion of bachelor’s degree in Mechanical Engineering. Path planning and trajectory generation for autonomous navigation of wheeled robots based on MPC. ROS was used as main working architecture with embedded systems like Arduino and Raspberry Pi.
View Project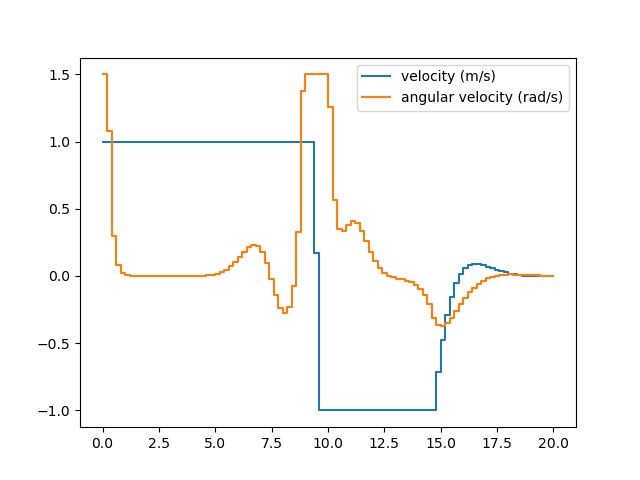
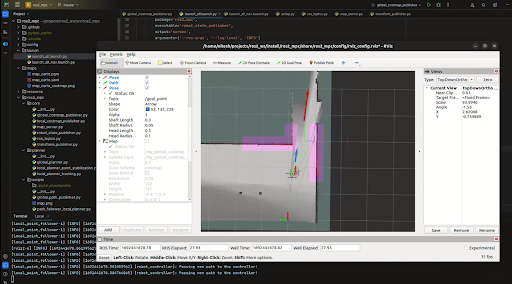
Design of full navigation stack based on MPC in ROS 2
Design of full navigation stack based on MPC in ROS 2 for autonomous navigation of wheeled robots. ROS 2 was used as main working architecture with embedded systems like Arduino and Raspberry Pi written in Python with NUMBA acceleration.
CasADi framework with IPOPT solver used for the path optimization with fully customizable parameters. Design of local planner as controller plugin for Controller Server in ROS 2 written in C++.
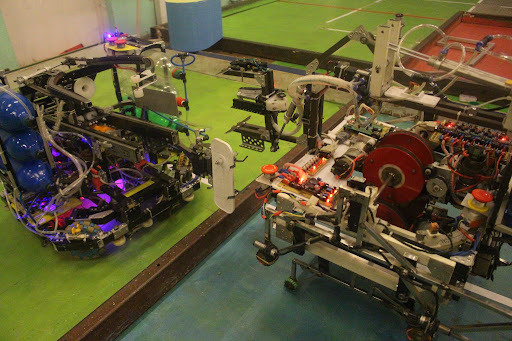
Robots for ABU ROBOCON
In a lab facility provided by the university, I mentored for ABU Robocon 2021 in China and oversaw a team of 21 undergraduate students for the mechanical design and control team for ABU Robocon 2020, Fiji. I also worked as a student team member for ABU-Robocon 2019, Mongolia, and ABU-Robocon 2018, Vietnam.



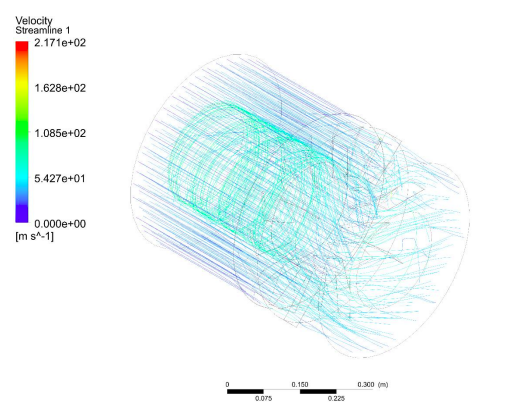
Design and Analysis of an Axial Flow Compressor
Design and analysis of an axial flow compressor for a gas turbine engine. The compressor was designed for the given specifications and was analyzed for the performance of the compressor. The compressor was designed using the mean line method and was analyzed using the CFD software ANSYS Fluent.
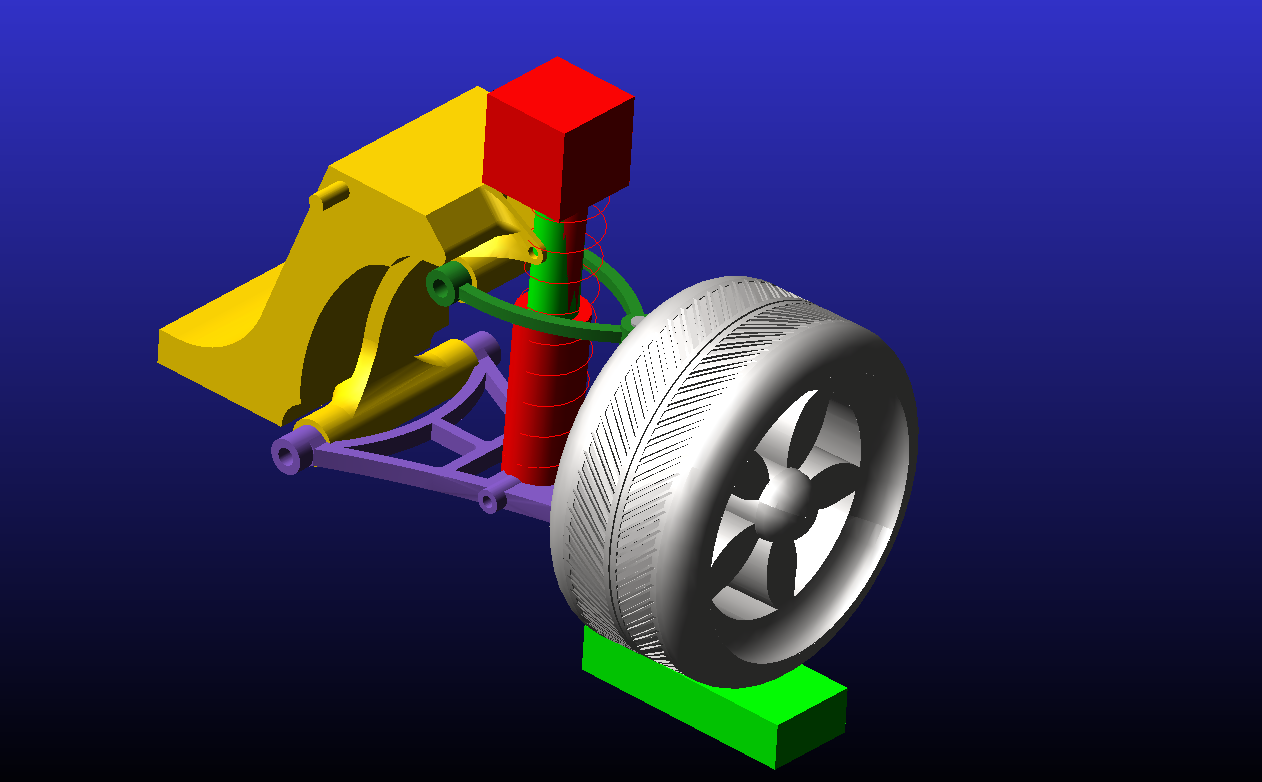
Design and Control of Active Hydraulic Suspension System for Passenger Vehicles
Design and control of an active hydraulic suspension system for passenger vehicles. The suspension system was designed using the kinematic and dynamic analysis of the suspension system. The control system was designed using the PID controller and was simulated using ADAMS and MATLAB Simulink co-simulation.
Model Predictive Control for Autonomous Trajectory Generation of UAV
Autonomous trajectory generation of UAV using MPC. The trajectory generation was done using the kinematic and dynamic model of the UAV. The MPC controller was designed using the CasADi library in MATLAB.
View Project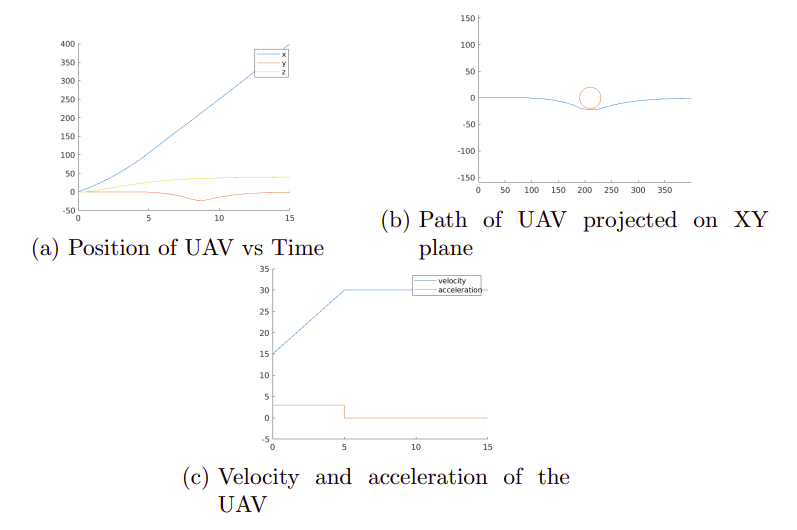
Design and implementation of autonomous environment exploration algorithm
Autonomous environment exploration algorithm for wheeled robots. The algorithm was designed using the kinematic and dynamic model of the wheeled robot. The algorithm was implemented using ROS and Gazebo simulation. Custom frontier exploration algorithm for autonomous map creation in an unknown environment for ROS 2 written in Python with NUMBA acceleration.
Design and implementation of a MPC controller for a quadcopter
Design and implementation of a MPC controller for a quadcopter. The MPC controller was designed using the kinematic and dynamic model of the quadcopter. The MPC controller was implemented using ROS and Gazebo simulation.
Design and implementation of person re-identification using YOLO, DeepSort and OpenCV
Designing a full pipeline to select a person to follow, follow the person in dynamic environment and re-identify even if person goes out of frame, autonomously.